Publications & Patents
See Research Experience for details.
Publications
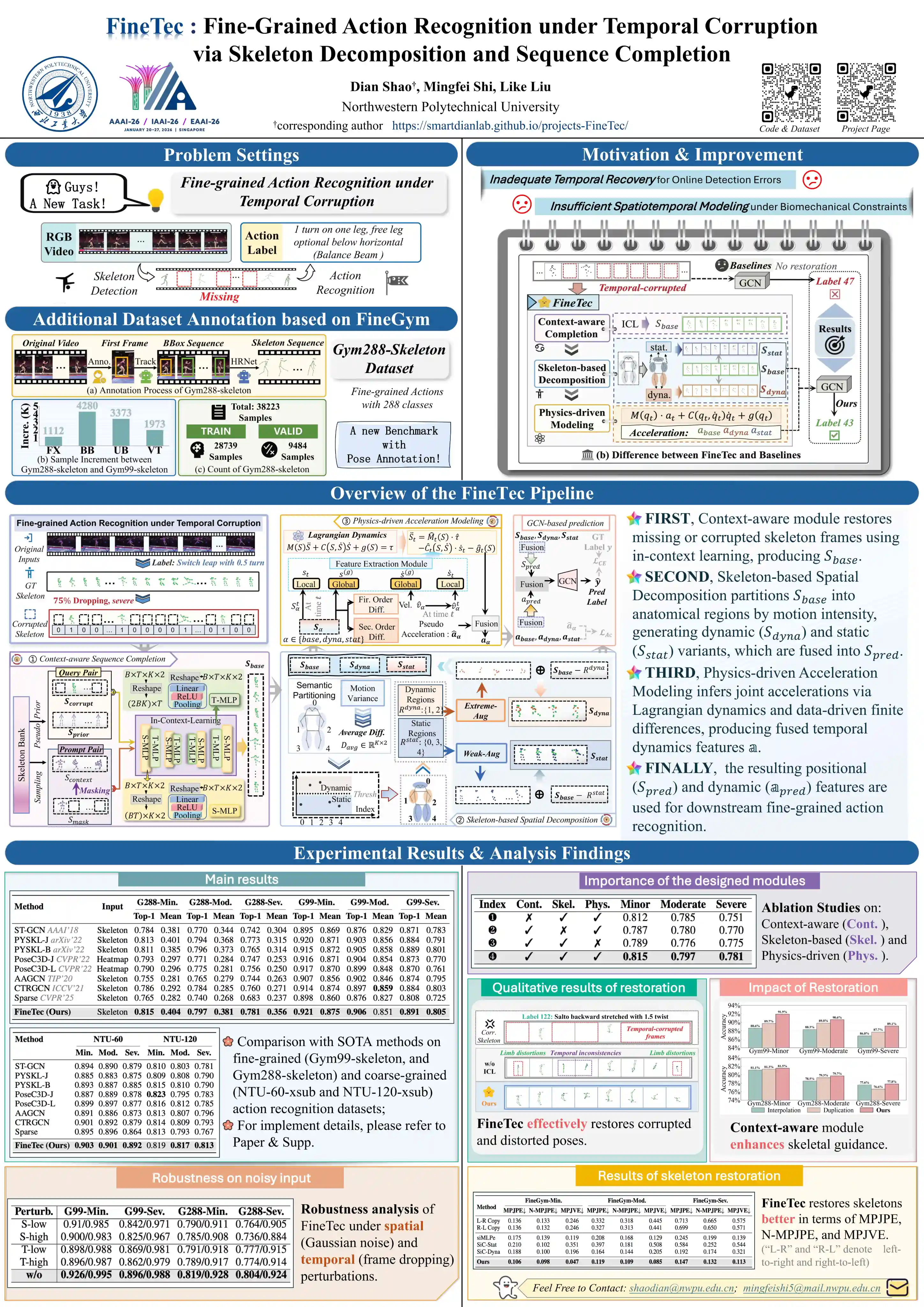
FineTec: Fine-Grained Action Recognition under Temporal Corruption via Skeleton Decomposition and Sequence Completion
Dian Shao, Mingfei Shi, Like Liu
Proceedings of the 40th AAAI Conference on Artificial Intelligence (AAAI 2026)
A unified framework for fine-grained action recognition under temporal corruption using context-aware sequence completion, skeleton-based spatial decomposition and physics-driven acceleration modeling. Also a new dataset Gym288-skeleton extended from FineGym, for more fine-grained evaluation.
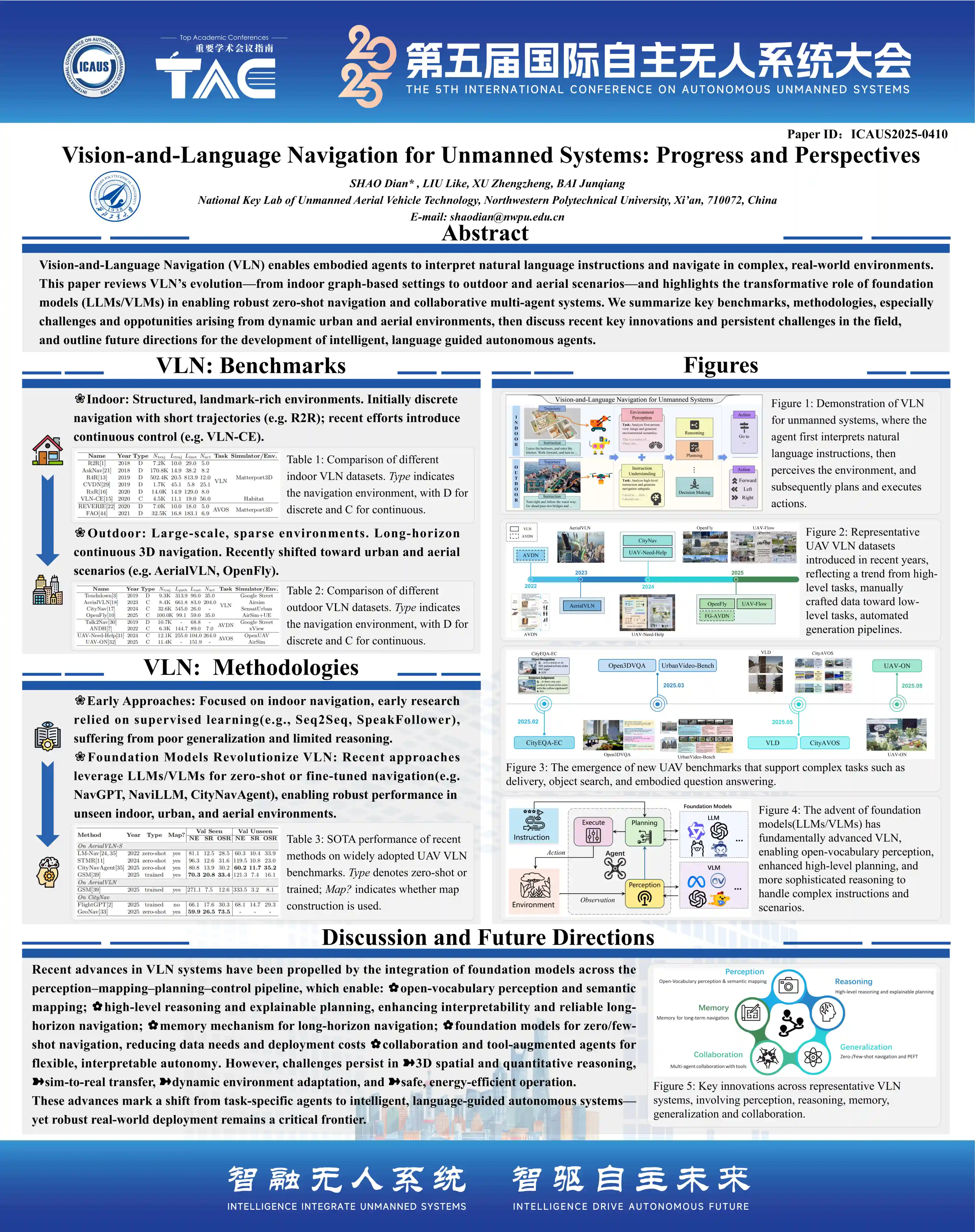
Vision-and-Language Navigation for Unmanned Systems: Progress and Perspectives
Dian Shao, Like Liu, Zhengzheng Xu, Junqiang Bai
Proceedings of the 5th International Conference on Autonomous Unmanned Systems (ICAUS 2025)
Survey paper on VLN for unmanned systems, covering progress and future directions.
FineCog-Nav: Integrating Fine-grained Cognitive Modules for Zero-shot Multimodal UAV Navigation
Dian Shao, Zhengzheng Xu, Peiyang Wang, Like Liu, Yule Wang, Jieqi Shi, Jing Huo
Submitted to CVPR 2026
Zero-shot UAV navigation framework integrating fine-grained cognitive modules based on LLM/VLM.
Intelligent UAVs Empowered by Large Models: Progress, Applications and Perspectives
Dian Shao, Chu Tang, Min Chang, Like Liu, Yule Wang, Hao Li, Junqiang Bai
Submitted to Acta Aeronautica et Astronautica Sinica
Survey paper on large language model applications in intelligent UAV systems.
Whole-Body Control for Multi-Contact Balancing of Humanoid Robots: Design and Experiments
Bernd Henze (Author), Liang He (Translator), Yan Ma (Translator), Like Liu (Translator), Yuting Shi (Translator)
National Defense Industry Press, Beijing
Translated monograph on whole-body control for humanoid robots.
Patents
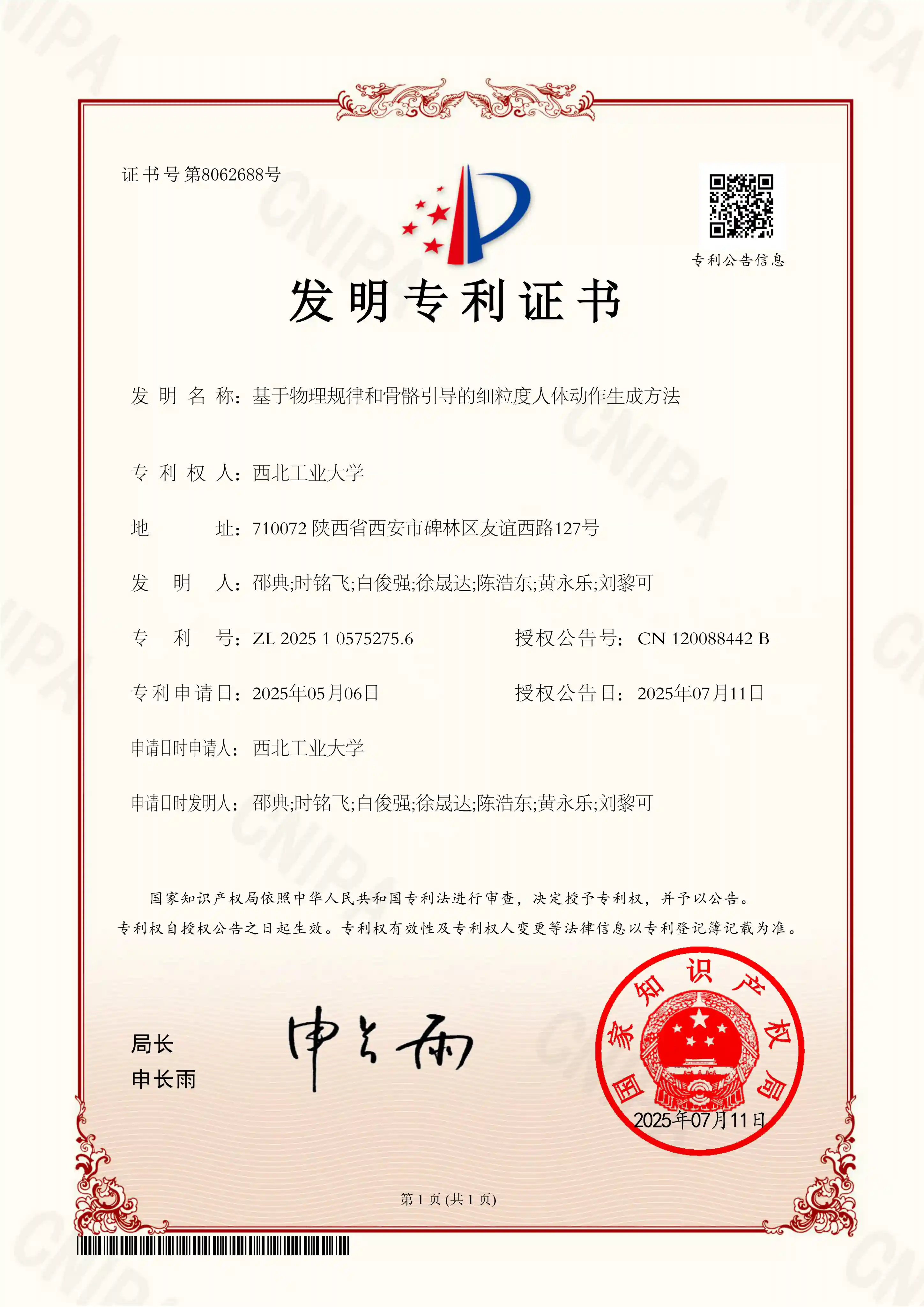
Fine-grained Human Motion Generation Method Based on Physical Laws and Skeleton Guidance
Dian Shao, Mingfei Shi, Junqiang Bai, Shengda Xu, Haodong Chen, Yongle Huang, Like Liu
Granted, No. ZL202510575275.6
Invention patent for fine-grained human motion generation using physical laws and skeleton guidance.
Humanoid Robot Navigation Method Using a Hybrid Fuzzy Neural Network and Adaptive PID Control Algorithm
Like Liu, Boyang Sun, Liang He†
Published, No. CN120385341A
Humanoid robot navigation method combining fuzzy neural network and adaptive PID control.
Zero-finetuning Vision-Language Navigation Method for UAVs via Integration of Fine-grained Cognitive Modules
Dian Shao, Zhengzheng Xu, Peiyang Wang, Like Liu, Jieqi Shi, Yule Wang, Jing Huo
Pending
Patent for zero-finetuning UAV vision-language navigation using cognitive modules.
Fine-grained Action Recognition under Temporally Corrupted Sequences via Skeleton Decomposition and Sequence Completion
Dian Shao, Mingfei Shi, Like Liu
Pending
Patent for fine-grained action recognition using skeleton decomposition.

Time-window Constrained Multi-node Path Planning System
Like Liu, Haoxuan Li
No. 12125321
Software copyright for time-window constrained multi-node path planning system.

UAV-enabled Low-altitude Logistics Planning System
Yutong Li, Like Liu, Haoxuan Li
No. 13950938
Software copyright for UAV-enabled low-altitude logistics planning system.

GTD-based Task Assignment and Management System
Like Liu, Shuchang Zhang, Zhenguo Li, et al.
No. 15861786
Software copyright for GTD-based task assignment and management system.